Thực tế tại Việt Nam
TS. Ngô Mạnh Tiến - Viện Vật lý - Viện Hàn Lâm khoa học Việt Nam cho biết trong công nghiệp 4.0 vai trò của các hệ thống robot chiếm vị trí quan trọng, trong đó robot tự hành thông minh AMR (Autonomous Mobile Robot) là một lĩnh vực thu hút được nhiều sự chú ý của cộng đồng khoa học bởi vai trò quan trọng của nó trong cuộc sống hàng ngày cũng như trong công việc sản xuất và các dây chuyền tự động tại các nhà máy công nghiệp.
Việc robot có thể di chuyển tự động linh hoạt trong một phạm vi nhất định và thực hiện những tác vụ định trước thay thế vai trò của con người có thể đem lại nhiều lợi ích về kinh tế, năng suất lao động, và bảo vệ sức khoẻ của con người.
Ứng dụng của robot tự hành có thể kể ra là rất rộng: trong đời sống xã hội là các xe tự lái, xe tự hành phục vụ, vận chuyển… các xe tự hành vận chuyển vật tư vật liệu, hàng hóa sản phẩm, trong các nhà máy, trong các nhà xưởng, trong logistics, vận chuyển kho bãi, trong an ninh quốc phòng là các robot dò phá bom mìn, trinh sát, robot chiến trường…
Đặc biệt, TS Tiến cho biết trong đại dịch Covid-19 đang diễn biến phức tạp trên thế giới, việc di chuyển đi lại của con người bị hạn chế, tại các khu vực chịu ảnh hưởng nhiều của dịch, hay tại những trại cách ly thì việc ứng dụng các robot tự hành mang lại hiệu quả cao.
Tại Việt Nam, hiện mới chỉ có một số ít Công ty tiếp cận vào hướng xe tự hành AGV phục vụ cung cấp cho các nhà máy vừa và nhỏ, các tập đoàn lớn như Samsung, Panasonic, Foxcon, Vinfast…vv đều đang sử dụng AGV ngoại nhập. Còn AMR hiện Việt Nam chưa có sản phẩm được sử dụng tại tất cả các nhà máy, và cũng luôn sẵn sàng ứng dụng, sử dụng các sản phẩm AMR theo điều tra khảo sát. Về nghiên cứu và phát triển AMR, hiện cũng đã có một số đơn vị, doanh nghiệp tại Việt Nam đặt vấn đề nghiên cứu tuy nhiên các kết quả là chưa có gì nổi bật.
 |
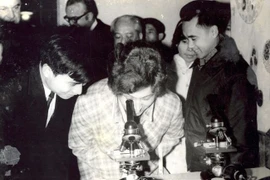
| TS Tiến cùng các cộng sự của mình thực nghiệm robot tự hành. |
Nhóm nghiên cứu của TS Tiến đã nghiên cứu cấu trúc robot tự hành với các chức năng quản lý, điều hành sản xuất kinh doanh của một tập đoàn, công ty, nhà máy sản xuất I4.0 bao gồm các lớp sau:
Level 4: Business Planning: ERP, SCM
Level 3: Mfg Operation mgt: MES, CAD, PLM
Level 2: Supervisory Control: Scada, HMI
Level 1: Plant Control: PLC, DCS
Level 0: Physical equipment: I/O, Devices
TS Tiến cho biết robot tự hành AMR-AITT_IOP thông minh có 3 công nghệ chủ chốt:
Thực thi lập trình trên phần mềm chuyên dụng cho robot hiện đại hiện nay - hệ điều hành lập trình Robot Operating System (ROS).
Hệ điều hành ROS là một nền tảng linh hoạt cho việc lập trình các phần mềm cho hệ thống robot. Nó bao gồm các công cụ và thư viện nhằm đơn giản hoá việc xây dựng các hệ thống robot phức tạp bằng việc kết hợp các nền tảng robot với nhau.
Hơn thế nữa, ROS được xây dựng để tạo điều kiện cho việc phát triển và kết hợp các phần mềm robot với nhau một cách thuận lợi. ROS là một mã nguồn mở, một hệ điều hành hiệu quả cho việc lập trình các hệ thống robot. Những đặc điểm này của ROS đã cho phép người dùng thiết lập một môi trường có thể hợp tác phát triển phần mềm cho robot ở mức toàn cầu. Sử dụng các API đã nghiên cứu và phát triển cho robot sẽ giúp rút ngắn quá trình nghiên cứu, ứng dụng, và đây cũng là mục tiêu cuối cùng của ROS.
Thực thi công nghệ tự định vị và bản đồ hóa môi trường hoạt động của robot (SLAM - Simultaneous Localization and Mapping) đây chính là hệ thống nhận thức của robot.
Sau khi được hệ thống nhận thức cung cấp thông tin về bản đồ hoá môi trường, vị trí của robot (SLAM) và vật cản cho hệ thống điều hướng, khi đó hệ thống điều hướng sẽ có nhiệm vụ xây dựng quỹ đạo chuyển động cho robot hướng tới vị trí đích sao cho robot có thể di chuyển tới vị trí đích và có thể tránh được vật cản xuất hiện trên đường đi. Các tín hiệu điều khiển từ hệ thống điều hướng sẽ điều khiển robot để đáp ứng việc chuyển động linh hoạt trong môi trường không xác định.
Hệ thống nhận thức còn có chức năng phát hiện vật cản dựa vào tín hiệu laser scan và point cloud 3D.Xây dựng thuật toán điều hướng thông minh dựa trên học sâu tăng cường Reinforcement Deep Learning.
Hệ thống điều hướng thông minh được thiết kế dựa trên học sâu tăng cường (Reinforcement Deep Learning) với nhiệm vụ giúp robot có thể tự động di chuyển tới vị trí đích trong môi trường 2D mà trước đó robot chưa hề biết trước thông tin về bản đồ cũng như vật cản của môi trường.
Các dữ liệu từ các cảm biến bao gồm lidar và 3D camera được chuẩn hoá và làm đầu vào cho mạng nơ-ron. Mạng nơ-ron bao gồm hai mạng con được xây dựng và huấn luyện trên hệ điều hành ROS.
Với việc kết hợp các cảm biến cho việc nhận dạng môi trường và mạng học sâu tăng cường được huấn luyện, robot có thể di chuyển được tới vị trí đích trong môi trường thực tế mà trước đó robot chưa hề có bất cứ thông tin nào về môi trường.
Kết quả nghiên cứu của AMR-AITT_IOP
Theo TS Tiến hiện hệ thống điều hướng thông minh cho robot AMR-AITT_IOP sau khi được huấn luyện trên môi trường xây dựng trên hệ điều hành ROS được tiến hành thử nghiệm trên môi trường thực tế tại Viện Hàn lâm Khoa học và Công nghệ Việt Nam.
Kết quả cho thấy robot có thể di chuyển tới vị trí đặt bất kỳ trong phạm vi của môi trường thử nghiệm đồng thời tránh được vật cản trong quá trình di chuyển. Hơn thế nữa, hệ thống điều hướng thông minh cho robot AMR-AITT_IOP có thể hoạt động hiệu quả trong môi trường thực tế mà trước đó robot chưa hề biết trước thông tin về bản đồ cũng như vật cản môi trường.
Nhóm nghiên cứu đã phá triển 3 dạng phần cứng khác nhau của robot tự hành nhằm phục vụ các mục đích ứng dụng khác nhau: Omni Robot – nhằm phục vụ các dịch vụ phục vụ con người, trang bị cho các bệnh viện, phục vụ và khử khuẩn khu cách ly…vv; AMR robot phục vụ cho các nhà máy sản xuất công nghiệp, dịch vụ vẫn chuyển trong nhà kho, bãi, logistics…









![[INFOGRAPHIC] Đặc sản Việt Nam được vinh danh trên bản đồ ẩm thực thế giới](https://cdn.kienthuc.net.vn/images/7c7c4b21a1322a4fd1db9c480871f9455168e56e8417ad9368d03860032170f46a54cfe5c062317d5f61ee88871e15a96b8b0d3d0fc7c3b4996ce057541181eb/info-amthuc-02.jpg.webp)
![[INFOGRAPHIC] Mẹo trang điểm nhanh cho người bận rộn](https://cdn.kienthuc.net.vn/images/c436f28f294de52c13e0eb38093fb9143201d0cdbc65b7ef1fdccf2d4c6dfba6a28b7ce91e4a401bcb218c735cf974297df5d91c06725e95c34386068629bf8e/info-meo-trangdiem-02.jpg.webp)