




















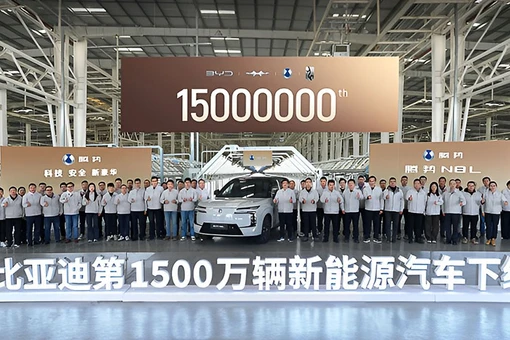
Với tổng sản lượng 15 triệu xe năng lượng mới gồm xe điện chạy pin (BEV) và hybrid cắm sạc (PHEV), BYD hiện vượt xa nhiều nhà sản xuất ôtô quốc tế lớn.



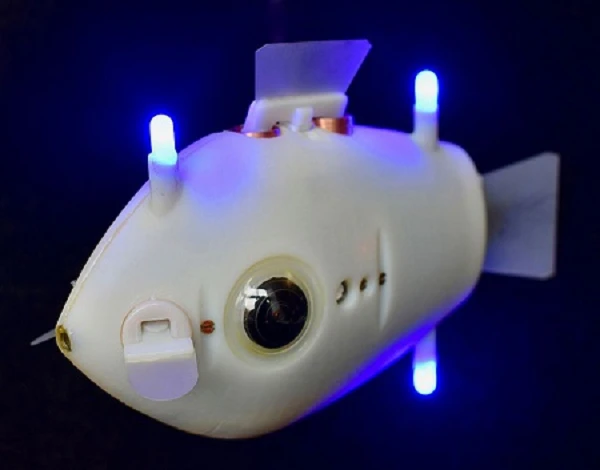
Ukraine tuyên bố đã vô hiệu hóa tàu ngầm Kilo Nga tại Novorossiysk bằng UAV dưới nước, mở ra bước ngoặt mới cho chiến tranh hải quân Biển Đen.

Chỉ bằng một khoảnh khắc ăn kem khác thường, hot girl washi_iiii đã nhanh chóng thu hút hàng trăm nghìn lượt xem và bàn luận sôi nổi.

Trong tháng 11 âm, ba con giáp may mắn đón tài lộc qua các mối quan hệ xã hội, giúp tăng thu nhập và mở rộng cơ hội tài chính cuối năm.

Vườn quốc gia Ujung Kulon là vùng đất hoang dã nguyên sơ bậc nhất Indonesia, nổi tiếng với hệ sinh thái đa dạng cùng sự tồn tại của một sinh vật khổng lồ.

Căn hộ mới vừa hoàn thiện của vợ chồng Ly Kute mang phong cách hiện đại, có tông trắng sáng chủ đạo, nội thất cao cấp.
Con trai diễn viên Diễm My 9x chào đời vào đầu năm 2025, 'trộm vía' rất đáng yêu và kháu khỉnh.

Nhóm hacker ShinyHunters đe dọa tung 200 triệu bản ghi cực kỳ nhạy cảm liên quan PornHub, làm dấy lên nỗi lo khủng hoảng quyền riêng tư toàn cầu.

Giới khảo cổ vẫn chưa thể giải đáp mục đích tồn tại của Rujm el-Hiri, công trình đá tiền sử bí ẩn giữa Cao nguyên Golan.

Ếch độc nhuộm (Dendrobates tinctorius) là loài lưỡng cư độc đáo bậc nhất rừng mưa Nam Mỹ, nổi tiếng với sự đa dạng về màu sắc giữa các quần thể.

Diễn viên hài Lê Dương Bảo Lâm đăng tải loạt ảnh con trai thứ ba Phin cố gắng tỏ ra lạnh lùng.

Mook Karnruethai Tassabut ngày càng quyến rũ, sắc sảo sau khi đoạt danh hiệu Á hậu Miss Cosmo 2024.

Mẫu MPV cỡ nhỏ Nissan Gravite giá siêu rẻ mới vừa được hé lộ thêm nhiều chi tiết thiết kế trước khi chính thức ra mắt vào tháng 1/2026 tới đây.

Meta đang thử nghiệm tính phí người dùng khi chia sẻ đường link trên Facebook, chỉ miễn phí 2 link mỗi tháng nếu không đăng ký Meta Verified.

Mí Háng đang vào mùa hoa tớ dày nở rực. Sắc hồng khoe sắc trong sương lạnh cuối đông khiến bản làng Mù Cang Chải trở nên rực rỡ, cuốn hút du khách thập phương.

Trong bộ ảnh mới, Quỳnh Trương khiến người hâm mộ phải ngẩn ngơ bởi vẻ đẹp thanh khiết, thoát tục tựa như một nàng thơ bước ra từ tranh vẽ.
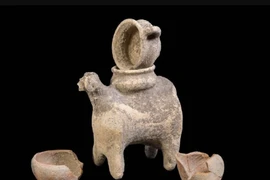
Chiếc ấm trà cổ được thiết kế hình con cừu khiến các chuyên gia sửng sốt vì độ tinh xảo. Vật dụng này thuộc về ai và vì sao tồn tại tới ngày nay?

Thông qua hoạt động đặt bẫy ảnh, Khu Bảo tồn thiên nhiên Pù Hoạt (tỉnh Nghệ An) lần đầu tiên ghi nhận sự xuất hiện của beo lửa đặc biệt quý hiếm.

Tại sự kiện, siêu mẫu Thanh Hằng được chồng giúp chỉnh sửa phục trang. Từ khi kết hôn, cả hai không ít lần sánh đôi trước công chúng.

New York mùa đông thu hút du khách bởi tuyết trắng phủ khắp đường phố, công viên và quảng trường, mở ra hành trình khám phá lãng mạn và giàu trải nghiệm.

Sau chiến thắng của U22 Việt Nam trước Thái Lan tại trận chung kết SEA Games vào tối qua, nhiều người dân đã rủ nhau tràn xuống đường, cùng ăn mừng đầy cảm xúc.


