


















Gói thầu thi công xây lắp và thiết bị thuộc dự án xây dựng mới Trường Mầm non Rạng Đông 13 – cơ sở 1, Quận 6, TP HCM đã thu hút hai nhà thầu tham gia.





Theo tử vi 12 con giáp, có 4 con giáp được dự báo “vận đỏ như son” năm 2026, dễ giành giải thưởng, thường xuyên nhận được khoản tiền bất ngờ.

Sinh viên khảo cổ Katie Joss tìm thấy một bức tượng đầu đá Viking hơn 900 năm tuổi, khác biệt hoàn toàn so với các khám phá trước đây.
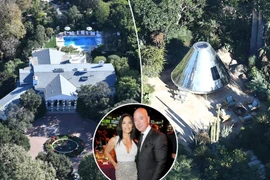
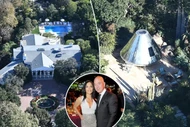
Biệt thự của Jeff Bezos tại Beverly Hills (Mỹ) có chi tiết giống như một chiếc UFO, thu hút sự chú ý.

Pavlopetri là một trong những di tích khảo cổ dưới nước cổ xưa nhất thế giới, hé lộ diện mạo một đô thị thời tiền sử.

Từ ngày 22 - 24/12, người yêu thiên văn có thể quan sát Trăng lưỡi liềm tuyệt đẹp sau khi Mặt trời lặn.
Lan Phương tự tin đăng ảnh mặt mộc trên trang cá nhân. Hoà Minzy nền nã khi diện áo dài truyền thống trong một sự kiện.
Bình Liêu mùa hoa sở trắng xóa núi rừng, hòa cùng sương sớm và lễ hội vùng cao, tạo nên hành trình khám phá giàu cảm xúc, níu chân du khách dịp cuối năm.
McLaren Ho Chi Minh City vừa ra mắt McLaren 750S Spider MSO Orange Coriolis - bản cá nhân hóa độc đáo được thực hiện bởi McLaren Special Operations (MSO).
Thời gian gần đây, Sĩ Thanh tích cực lăng xê những set đồ bó sát, khoe trọn đường cong nóng bỏng mọi lúc mọi nơi.

Các công cụ bằng gỗ có niên đại 90.000 năm, bao gồm một cây gậy đào đất dài 15 cm, được cho là do người Neanderthal chế tạo.

Loài khỉ râu trắng (Cercopithecus neglectus) là một trong những linh trưởng kỳ lạ nhất châu Phi, sở hữu ngoại hình độc đáo và tập tính sinh học đặc biệt.

Vợ chồng kiện tướng dancesport Khánh Thi – Phan Hiển khiến cộng đồng mạng “đứng ngồi không yên” khi chia sẻ bộ ảnh Noel của con gái út Lisa.

Tại Tháp nước Hàng Đậu, một toa tàu điện cổ được trang trí vô cùng độc đáo đã thu hút đông đảo du khách, đặc biệt là các bạn trẻ đến check – in.

Theo tử vi 12 cung hoàng đạo ngày 23/12, Ma Kết gặp quý nhân nâng đỡ, tiền bạc không lo. Thiên Bình nên phân tán rủi ro, không nên dồn hết vào một dự án.

Không chọn những concept Noel quen thuộc, cô nàng Nguyễn Phương Trang vừa khiến cộng đồng mạng 'dậy sóng' với bộ ảnh dạo phố đầy táo bạo, thu hút.

Ngôi nhà thiết kế đơn giản nhưng hiện đại, các không gian được phân bổ mạch lạc từ phòng ngủ, khu sinh hoạt chung đến sân vườn.

Nhân dịp Giáng sinh 2025, Vân Trang mời gia đình các diễn viên: Lê Phương, Thanh Trúc, Kha Ly đến ăn uống tại biệt thự riêng.

Với thiết kế độc đáo lấy cảm hứng từ nghệ thuật Vatican, Cầu Hôn trở thành điểm check-in nổi bật, nơi lưu giữ khoảnh khắc yêu thương và hoàng hôn tuyệt đẹp.

Mới đây, Quyên Qui đã khiến cộng đồng mạng 'đứng ngồi không yên' khi tung ra bộ ảnh đón Noel đầy quyến rũ, khẳng định phong cách gợi cảm đầy cuốn hút của mình.

Tử vi dự đoán, trong 10 ngày đầu tháng 11 âm lịch có những con giáp này nhận lộc trời ban, làm gì cũng giàu có.




